Numerical Methods
|
|
Numerical Methods | |
|
|
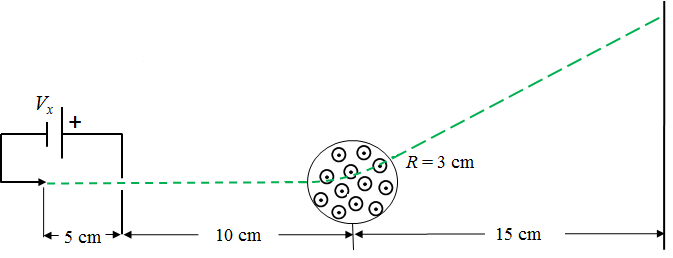
Magnetic deflection of an electron beamA magnetic field placed perpendicular to the velocity of electrons in an electron beam will bend the electrons in a direction that is perpendicular to both the velocity and the magnetic field. In the diagram below, electrons are accelerated through a voltage $V_x$ towards a positively charged plate. Some of the electrons pass through a small hole in the plate and form and electron beam that travels to a circular region where a magnetic field is generated by a solenoid. The Lorentz force deflects the electrons and they follow a circular path in the magnetic field. The beam then travels further and strikes a screen that is 15 cm to the right of the center of the solenoid.
In the simulation below, the electrons are accelerated from rest to the positively charged plate in a distance of 5 cm. The center of the solenoid is 10 cm to the right of the plate and the screen is 15 cm to the right of the center of the solenoid. The radius of the solenoid is 3 cm. A positive current through the solenoid results in a magnetic field in the positive $z$ direction. The acceleration voltage, the current through the solenoid, and the number of windings per meter of the solenoid can be adjusted. When the sliders are adjusted, the resulting forces are passed to a sixth-order differential equation solver which calculates the electron trajectory.
|